C++虚函数表(多态的实现原理)
“多态”的关键在于通过基类指针或引用调用一个虚函数时,编译时不确定到底调用的是基类还是派生类的函数,运行时才确定。这是如何实现的呢?
请看下面的程序,该程序演示了多态类对象存储空间的大小。
8, 12
如果将程序中的 virtual 关键字去掉,输出结果变为:
4, 8
对比发现,有了虚函数以后,对象所占用的存储空间比没有虚函数时多了 4 个字节。实际上,任何有虚函数的类及其派生类的对象都包含这多出来的 4 个字节,这 4 个字节就是实现多态的关键——它位于对象存储空间的最前端,其中存放的是虚函数表的地址。
每一个有虚函数的类(或有虚函数的类的派生类)都有一个虚函数表,该类的任何对象中都放着该虚函数表的指针(可以认为这是由编译器自动添加到构造函数中的指令完成的)。
虚函数表是编译器生成的,程序运行时被载入内存。一个类的虚函数表中列出了该类的全部虚函数地址。例如,在上面的程序中,类 A 对象的存储空间以及虚函数表(假定类 A 还有其他虚函数)如图 1 所示。
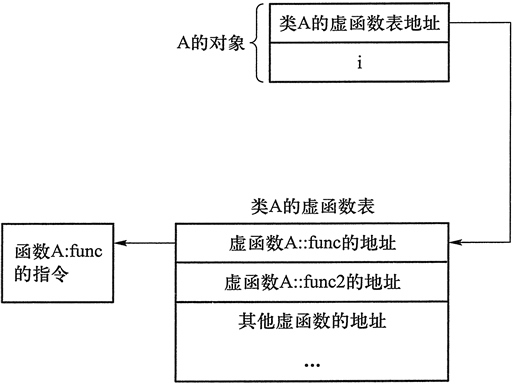
图1:类A对象的存储空间以及虚函数表
类 B 对象的存储空间以及虚函数表(假定类 B 还有其他虚函数)如图 2 所示。
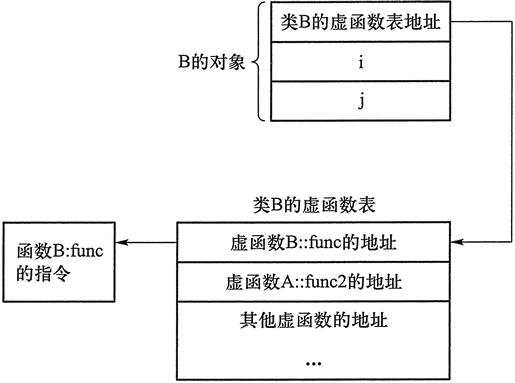
图2:类B对象的存储空间以及虚函数表
多态的函数调用语句被编译成根据基类指针所指向的(或基类引用所引用的)对象中存放的虚函数表的地址,在虚函数表中查找虚函数地址,并调用虚函数的一系列指令。
假设 pa 的类型是 A*,则 pa->func() 这条语句的执行过程如下:
1) 取出 pa 指针所指位置的前 4 个字节,即对象所属的类的虚函数表的地址(在 64 位编译模式下,由于指针占 8 个字节,所以要取出 8 个字节)。如果 pa 指向的是类 A 的对象,则这个地址就是类 A 的虚函数表的地址;如果 pa 指向的是类 B 的对象,则这个地址就是类 B 的虚函数表的地址。
2) 根据虚函数表的地址找到虚函数表,在其中查找要调用的虚函数的地址。不妨认为虚函数表是以函数名作为索引来查找的,虽然还有更高效的查找方法。
如果 pa 指向的是类 A 的对象,自然就会在类 A 的虚函数表中查出 A::func 的地址;如果 pa 指向的是类 B 的对象,就会在类 B 的虚函数表中查出 B::func 的地址。
类 B 没有自己的 func2 函数,因此在类 B 的虚函数表中保存的是 A::func2 的地址,这样,即便 pa 指向类 B 的对象,
3) 根据找到的虚函数的地址调用虚函数。
由以上过程可以看出,只要是通过基类指针或基类引用调用虚函数的语句,就一定是多态的,也一定会执行上面的查表过程,哪怕这个虚函数仅在基类中有,在派生类中没有。
多态机制能够提高程序的开发效率,但是也增加了程序运行时的开销。虚函数表、各个对象中包含的 4 个字节的虚函数表的地址都是空间上的额外开销;而查虚函数表的过程则是时间上的额外开销。
在计算机发展的早期,计算机非常昂贵稀有,运行速度慢,计算机的运算时间和内存是宝贵的,因此人们不惜多花人力编写运行速度更快、更节省内存的程序;如今,计算机的运算时间和内存往往没有人的时间宝贵,运算速度也很快,因此,在用户可以接受的前提下,降低程序运行的效率以提升人员的开发效率就是值得的了。“多态”的应用就是典型例子。
请看下面的程序,该程序演示了多态类对象存储空间的大小。
#include <iostream> using namespace std; class A { public: int i; virtual void func() {} virtual void func2() {} }; class B : public A { int j; void func() {} }; int main() { cout << sizeof(A) << ", " << sizeof(B); //输出 8,12 return 0; }在 32 位编译模式下,程序的运行结果是:
8, 12
如果将程序中的 virtual 关键字去掉,输出结果变为:
4, 8
对比发现,有了虚函数以后,对象所占用的存储空间比没有虚函数时多了 4 个字节。实际上,任何有虚函数的类及其派生类的对象都包含这多出来的 4 个字节,这 4 个字节就是实现多态的关键——它位于对象存储空间的最前端,其中存放的是虚函数表的地址。
每一个有虚函数的类(或有虚函数的类的派生类)都有一个虚函数表,该类的任何对象中都放着该虚函数表的指针(可以认为这是由编译器自动添加到构造函数中的指令完成的)。
虚函数表是编译器生成的,程序运行时被载入内存。一个类的虚函数表中列出了该类的全部虚函数地址。例如,在上面的程序中,类 A 对象的存储空间以及虚函数表(假定类 A 还有其他虚函数)如图 1 所示。
图1:类A对象的存储空间以及虚函数表
类 B 对象的存储空间以及虚函数表(假定类 B 还有其他虚函数)如图 2 所示。
图2:类B对象的存储空间以及虚函数表
多态的函数调用语句被编译成根据基类指针所指向的(或基类引用所引用的)对象中存放的虚函数表的地址,在虚函数表中查找虚函数地址,并调用虚函数的一系列指令。
假设 pa 的类型是 A*,则 pa->func() 这条语句的执行过程如下:
1) 取出 pa 指针所指位置的前 4 个字节,即对象所属的类的虚函数表的地址(在 64 位编译模式下,由于指针占 8 个字节,所以要取出 8 个字节)。如果 pa 指向的是类 A 的对象,则这个地址就是类 A 的虚函数表的地址;如果 pa 指向的是类 B 的对象,则这个地址就是类 B 的虚函数表的地址。
2) 根据虚函数表的地址找到虚函数表,在其中查找要调用的虚函数的地址。不妨认为虚函数表是以函数名作为索引来查找的,虽然还有更高效的查找方法。
如果 pa 指向的是类 A 的对象,自然就会在类 A 的虚函数表中查出 A::func 的地址;如果 pa 指向的是类 B 的对象,就会在类 B 的虚函数表中查出 B::func 的地址。
类 B 没有自己的 func2 函数,因此在类 B 的虚函数表中保存的是 A::func2 的地址,这样,即便 pa 指向类 B 的对象,
pa->func2();这条语句在执行过程中也能在类 B 的虚函数表中找到 A::func2 的地址。3) 根据找到的虚函数的地址调用虚函数。
由以上过程可以看出,只要是通过基类指针或基类引用调用虚函数的语句,就一定是多态的,也一定会执行上面的查表过程,哪怕这个虚函数仅在基类中有,在派生类中没有。
多态机制能够提高程序的开发效率,但是也增加了程序运行时的开销。虚函数表、各个对象中包含的 4 个字节的虚函数表的地址都是空间上的额外开销;而查虚函数表的过程则是时间上的额外开销。
在计算机发展的早期,计算机非常昂贵稀有,运行速度慢,计算机的运算时间和内存是宝贵的,因此人们不惜多花人力编写运行速度更快、更节省内存的程序;如今,计算机的运算时间和内存往往没有人的时间宝贵,运算速度也很快,因此,在用户可以接受的前提下,降低程序运行的效率以提升人员的开发效率就是值得的了。“多态”的应用就是典型例子。
所有教程
- C语言入门
- C语言编译器
- C语言项目案例
- 数据结构
- C++
- STL
- C++11
- socket
- GCC
- GDB
- Makefile
- OpenCV
- Qt教程
- Unity 3D
- UE4
- 游戏引擎
- Python
- Python并发编程
- TensorFlow
- Django
- NumPy
- Linux
- Shell
- Java教程
- 设计模式
- Java Swing
- Servlet
- JSP教程
- Struts2
- Maven
- Spring
- Spring MVC
- Spring Boot
- Spring Cloud
- Hibernate
- Mybatis
- MySQL教程
- MySQL函数
- NoSQL
- Redis
- MongoDB
- HBase
- Go语言
- C#
- MATLAB
- JavaScript
- Bootstrap
- HTML
- CSS教程
- PHP
- 汇编语言
- TCP/IP
- vi命令
- Android教程
- 区块链
- Docker
- 大数据
- 云计算